
האמת היא שטכנולוגיה תמיד תזדקק לכושר ההמצאה של המפתחים כדי לפתור את הבעיות המורכבות ביותר. פתרון זה לייעול מצב הדיוקן של הפיקסל הגיע מגוגל עם מארז מיוחד עם 5 מצלמות.
עכשיו אתה תוהה מדוע יש צורך ב -5 מצלמות יחד במקרה אחד על מנת למצוא פיתרון לבעיה שיכול להיות לקחת רק את פני האדם המוצג ולהשאיר את שאר הסצנה מחוץ למוקד. לשם כך גוגל והבלוג שלה נועדו לתת לנו סדרת הסברים.
מצב דיוקן מרשים של פיקסל 3
בפיקסל 2 ה- G הגדול קפץ קפיצה איכותית בתחום הצילום ממכשיר נייד. בפשטות נדהמנו איך הוא מסוגל, מהתוכנה, כדי להיות מסוגל לנתח סצנה כך שכל דבר פרט לפרצופם של המתוארים מטושטש להפליא.
![]()
גם לפיקסל 3 עבדה בדרכה שלה לשיפור הטכנולוגיה הזו וקפיצה קטנה באיכות בהשוואה למה שהובא לפיקסל 2. הדבר המצחיק, והסקרן בו זמנית, הוא שבפיקסל 3 הוא השתמש במה שאפשר לכנות מקרה פרנקסטיין של 5 טלפונים פיקסל אחד.
הוא השתמש בכיסוי הזה כדי שיוכל לקחת 5 צילומים של אותה סצנה בו זמנית וכך להיות מסוגל לשפר את מצב הדיוקן (כפי שצוין בפוסט זה עם תוצאות מצוינות) de su excelente Pixel 3; del que ya hemos hablado en numerosas ocasiones de su apasionante Night Sight o אותו סופר זום שנוכל לקבל בפיקסל 2).
כיצד שיפרה גוגל את מצב הדיוקן של פיקסל 3
פיקסל 2 הסתמך בכבדות על טכנולוגיית PDAF (Phase Detection Autofocus) לאסוף מידע בסיסי מעומק השדה, דרך שני הצמצמים של ה- PDAF שנהג להתמקד. הנכות היחידה של מערכת זו היא שהיא לא הייתה מושלמת לחלוטין. מכיוון שבסצנות מסוימות, בהן שפע רב של קווים אופקיים מתקיימים במקביל, ניתן לבלבל בין "המערכת" המטפלת בהשוואות דימויים אלה של PDAF כדי לקבוע עומק.
להבנתנו, אלמנטים חזותיים המתיישרים עם תצורה לינארית של צמצמי ה- PDAF עלולים לגרום לשלילה כוזבת. מה קיבל את זה את התוכן שחשוב לצילום זה נראה קרוב יותר למצלמה מאשר בפועל.

זה נמצא בפיקסל 3 שבו נמצא הפיתרון על ידי הוספת נתונים נוספים שאיתם גוגל כינה רמזים סמנטיים וטשטוש. בואו נגיד מה כולנו יכולים לעשות כשאנחנו מסתכלים על תמונה ונוכל לדעת את הגודל היחסי של האובייקטים ואת הטשטוש שלהם.
לא קל כמו שזה נראה
אבל כדי שהכל יהיה מושלם, גוגל הייתה חייבת הרכבת טכנולוגיה עם מה שאפשר לכנות פרשת פרנקנשטיין עם אותם 5 פיקסלים. איתו ניתן היה לצלם לכידת תמונות מחמש זוויות שונות בו זמנית.
![]()
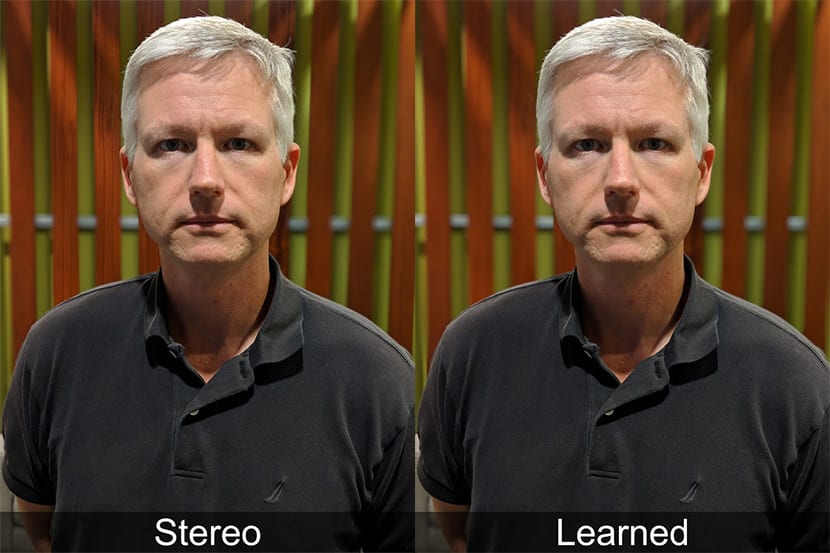
זה הבטיח שמקור התמונות מגיע מאותו סוג חומרה, פיקסל 3, ושהפרספקטיבות השונות הללו מציעות יותר נתונים כדי לנסות למנוע את בעיית הנפילה על הקווים המתכנסים באותו כיוון כמו צמצמי ה- PDAF. ... בכל מקרה, לא כל הבעיות נפתרו, אבל כן, עכשיו העומק נקבע בצורה טובה יותר לדיוק רב יותר.
![]()
עם במקרה הזה וב- 5 פיקסל 3 שלו, גוגל הצליחה להכשיר את הרשת העצבית שאחראי לשילוב נתוני PAF «פרלקסה" והגילוי הקודם כדי להביא לדיוק רב יותר למצב הדיוקן שלו בכל הרמות. עוד אחד מנקודות השיא של שיפור זה בטכנולוגיה של מצב דיוקן הוא שכל נתוני העומק בצילומים נשמרים במצב זה, ולכן החלון נפתח לפונקציות חדשות למפתחים לנצל.
